

How to Use Pico to Make Electronic hourglass --- RaspberryPiPico Kit

Project Introduction:
Turn the encoder to set the time, and it will be displayed on the TM1637 4-Bits digital tube in real time. Press the button and the electronic hourglass starts working.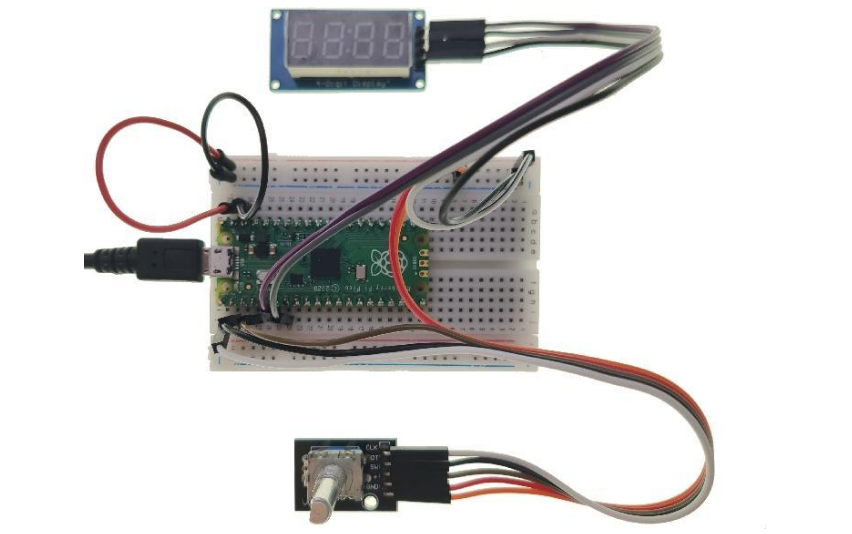
Material preparation:
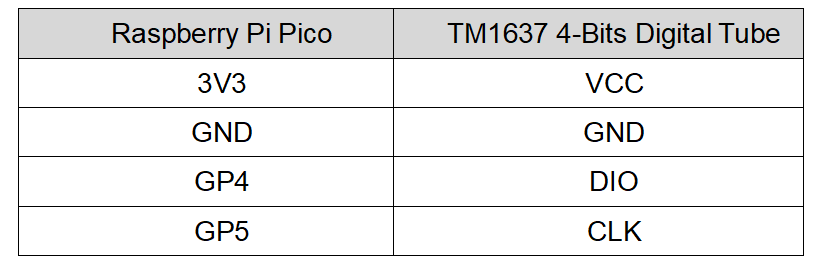
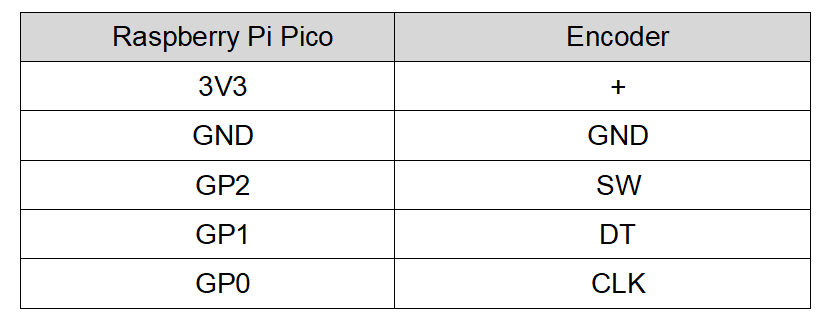
Raspberry Pi Pico*1, USB Cable*1, Breadboard*1, Encoder*1, TM1637 4-Bits Digital Tube*1, Dupont lineCircuit connection:
Library file installation:
Upload the "tm1637.py" library file to the Raspberry Pi Pico.Step1: Download tm1637.zip, unzip the file and copy tm1637.py to library folder.
Step2: Connect the Pico to Thonny with a USB cable;
Step3: Find the "tm1637.py" library in the file window;
Step4: Right-click and select "Upload to / " to start uploading the library file;
Step5: "tm1637.py" appears at bottom left, indicating that the upload is successful, and you can start running the program.
Program analysis: Electronic Hourglass
from machine import Pin
from time import sleep
import tm1637
tm = tm1637.TM1637(clk=Pin(4), dio=Pin(5))
RoA_Pin = 0 # CLK
RoB_Pin = 1 # DT
Btn_Pin = 2 # SW
globalCounter = 0 # counter value
flag = 0 # Whether the rotation flag occurs
Last_RoB_Status = 0 # DT state
Current_RoB_Status = 0 # CLK state
def setup():
global clk_RoA
global dt_RoB
global sw_BtN
clk_RoA = Pin(RoA_Pin,Pin.IN)
dt_RoB = Pin(RoB_Pin,Pin.IN)
sw_BtN = Pin(Btn_Pin,Pin.IN, Pin.PULL_UP)
# Initialize the interrupt function, when the SW pin is 0, the interrupt is enabled
sw_BtN.irq(trigger=Pin.IRQ_FALLING,handler=btnISR)
# Rotation code direction bit judgment function
def rotaryDeal():
global flag
global Last_RoB_Status
global Current_RoB_Status
global globalCounter
Last_RoB_Status = dt_RoB.value()
# Judging the level change of the CLK pin to distinguish the direction
while(not clk_RoA.value()):
Current_RoB_Status = dt_RoB.value()
flag = 1 # Rotation mark occurs
if flag == 1: # The flag bit is 1 and a rotation has occurred
flag = 0 # Reset flag bit
if (Last_RoB_Status == 0) and (Current_RoB_Status == 1):
globalCounter = globalCounter + 1 # counterclockwise, positive
if (Last_RoB_Status == 1) and (Current_RoB_Status == 0):
globalCounter = globalCounter - 1 # Clockwise, negative
# Interrupt function, when the SW pin is 0, the interrupt is enabled
def btnISR(chn):
global globalCounter
globalCounter = 0
print ('globalCounter = %d' %globalCounter)
while True:
# Define a counter that changes every 1 second
tm.number(globalCounter)
globalCounter = globalCounter - 1
sleep(1)
if globalCounter == 0:
break
def loop():
global globalCounter
tmp = 0
while True:
rotaryDeal()
if etmp != globalCounter:
print ('globalCounter = %d' % globalCounter)
tmp = globalCounter
tm.number(globalCounter)
if __name__ == '__main__':
setup()
loop()
Click link below to watch video:
https://www.youtube.com/watch?v=Sl1dVGrHXFg
Tagged:
Comments
Would love to have some thing like it, do you know where can i Find it? It looks awesome to be honest.
Here: https://www.elecrow.com/raspberry-pi-pico-advanced-kit-with-pico-board-32-modules-and-32-detailed-projects-lessons.html
Turning a Raspberry Pi Pico into an electronic hourglass is such a cool DIY idea! If you're into microcontroller projects, read this info for a simple and fun build.